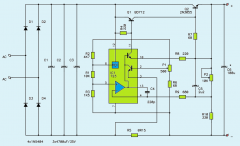
① 主电路 a) 主电路采用两组三相桥式晶闸管装置反并联的可逆线路,其中: ·正组晶闸管VF,由GTF控制触发, —正转时,VF整流; —反转时,VF逆变。 ·反组晶闸管VR,由GTR控制触发, —反转时,VR整流; —正转时,VR逆变。 b) 4个环流电抗器 L c1~Lc4。 L d 为平波电抗器。 c) 变压器 (TM) 付端绕组一套,给正反组VT供电。 ② 控制电路 a) 直流电流互感器或霍尔变换器( TA ),其输出作为电流负反馈。(不用交流互感器是由于其不能反映极性) b) 控制电路采用典型的转速、电流双闭环系统,其中: ASR设置了双向输出限幅电路,以限制最大起制动电流; ACR设置双向输出限幅电路,以限制最小控制角 αmin 与最小逆变角 β min 。 ASR、ACR 设计方法与第二章一样。 c) GTR前加反向器( AR )满足α =β 要求。 当Uct= ,VT—整流;VR—逆变。 当Uct= -,VR—整流; VT—逆变。 d) 给定接两个电位器,分别控制正反向,由KF、KR 接触器触点切换。 根据可逆系统正反向运行的需要,给定电压、转速反馈电压、电流反馈电压都应该能够反映正和负的极性。这里 ·给定电压:正转时,KF↓( 闭合 ), U*n=“ ”; 反转时,KR↓( 闭合 ), U*n=“-”。
(二)反桥制动( 转速降落 )阶段( Ⅱ ) 当主电路电流下降过零时,本组逆变终止,第 I 阶段结束,转到反组 VR 工作,开始通过反组制动。从这时起,直到制动过程结束,统称“反桥制动阶段”,这一阶段较复杂,可分成三个子阶段: ·反桥建流子阶段; ·反桥逆变子阶段; ·反桥减流子阶段。 1. 反桥建流子阶段 ( Ⅱ1 ) ① U *i= U *im,i d=0,ACR输出: -U ctm ② -U ctm : VF — 逆变|U dof| VR —整流 |U dor|
,E与|U dor|方向一致
E U dor =IdR LdId/dt 能量被R消耗,L吸收。 -I d ↑( 迅速反向增加 ) → -I dm M:反接制动 ,n开始↓
2. 反桥逆变子阶段( Ⅱ2 ) -I d↑→– I dm 并略有超调时,U *i= U *im<β I d U i= -,ACR 退出饱和,U ct由负变正( 急剧 ), U ct= :VF —待整流状态 VR—逆变状态 此后,在ACR的调节作用下,力图维持接近最大的反向电流 – I dm ,因而
E = U dor I dR LdId/dt
M在恒减速条件下回馈制动,把动能转换成电能,其中大部分通过 VR 逆变回馈电网,R消耗一部分。 M:发电制动状态。n↓,E↓ 要求U dor↓(以维持I d不变),则U ct↓(线性) ACR给定不变,维持恒值 U i=U *im - β I d>0 这个阶段所占的时间最长,是制动过程中的主要阶段
3. 反桥减流子阶段 ( Ⅱ3 ) 由 E = U dor I dR LdId/dt 可知, 当U dor↓→ 0,E 继续↓,这时I d 从 – I dm↓ 最后,n=0,E=0 在电流衰减过程中,电感 L上的感应电压 LdId/dt 支持着反向电流,并释放出存储的磁能,如果电机很快停止,整个制动过程便结束了。 如果考虑到其它因素,如L存储的磁能较大,电机的转速在最后一小段时间里有一些不同情况。











 为最小逆变角,
为最小逆变角,




 U n=U n= -,ASR输出
U n=U n= -,ASR输出
 很大。大部分能量通过 VF 回馈电网,所以称作“本组逆变阶段”。由于电流的迅速下降,这个阶段所占时间很短,转速来不及产生明显的变化。
很大。大部分能量通过 VF 回馈电网,所以称作“本组逆变阶段”。由于电流的迅速下降,这个阶段所占时间很短,转速来不及产生明显的变化。
 ,E与|U dor|方向一致
,E与|U dor|方向一致





