静止可控整流器
从20世纪50年代开始,采用汞弧整流器和闸流管这样的静止变流装置来代替旋转变流机组,形成所谓的离子拖动系统。离子拖动系统克服旋转变流机组的许多缺点,而且缩短了响应时间,但是由于汞弧整流器造价较高,体积仍然很大,维护麻烦,尤其是水银如果泄漏,将会污染环境,严重危害身体健康。因此,应用时间不长,到了20世纪60年代又让位给更为经济可靠的晶闸管整流器。
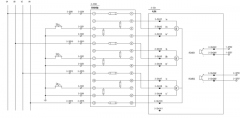
1957年,晶闸管问世,它是一种大功率半导体可控整流元件,俗称可控硅整流元件,简称“可控硅”,20世纪60年代起就已生产出成套的晶闸管整流装置。晶闸管问世以后,变流技术出现了根本性的变革。目前,采用晶闸管整流供电的直流电动机调速系统(即晶闸管-电动机调速系统,简称V-M系统,又称静止Ward-Leonard系统)已经成为直流调速系统的主要形式。图8.1所示是V-M系统的原理框图,图中V是晶闸管可控整流器,它可以是任意一种整流电路,通过调节触发装置GT的控制电压来移动触发脉冲的相位,从而改变整流输出电压平均值,实现电动机的平滑调速。和旋转变流机组及离子拖动变流相比,晶闸管整流不仅在经济性和可靠性上都有很大提高,而且在技术性能上显示出很大的优越性。晶闸管可控整流器的功率放大倍数大约在,控制功率小,有利于微电子技术引入到强电领域;在控制作用的快速性上也大大提高,有利于改善系统的动态性能。但是,晶闸管整流器也有它的缺点,主要表现在以下方面:
(1)晶闸管一般是单向导电元件,晶闸管整流器的电流是不允许反向的,这给电动机实现可逆运行造成困难。必须实现四象限可逆运行时,只好采用开关切换或正、反两组全控型整流电路,构成V-M可逆调速系统,后者所用变流设备要增多一倍。
(2)晶闸管元件对于过电压、过电流以及过高的du/dt和di/dt十分敏感,其中任一指标超过允许值都可能在很短时间内元件损坏,因此必须有可靠的保护装置和符合要求的散热条件,而且在选择元件时还应保留足够的余量,以保证晶闸管装置的可靠运行。
(3)晶闸管的控制原理决定了只能滞后触发,因此,晶闸管可控制整流器对交流电源来说相当于一个感性负载,吸取滞后的无功电流,因此功率因素低,特别是在深调速状态,即系统在较低速运行时,晶闸管的导通角很小,使得系统的功率因素很低,并产生较大的高次谐波电流,引起电网电压波形畸变,殃及附近的用电设备。如果采用晶闸管整流装置的调速系统在电网中所占容量比重较大,将造成所谓的“电力公害”。为此,应采取相应的无功补偿、滤波和高次谐波的抑制措施。
(4)晶闸管整流装置的输出电压是脉动的,而且脉波数总是有限的。如果主电路电感不是非常大,则输出电流总存在连续和断续两种情况,因而机械特性也有连续和断续两段,连续段特性比较硬,基本上还是直线;断续段特性则很软,而且呈现出显著的非线性。
图8.1 晶闸管-电动机调速系统原理框图(V-M系统)