步进电机的分类、结构和原理
时间:2023-06-08作者:佚名
|
根据转矩产生原理,步进电机可分为励磁型、无功型和混合式步进电机,步进电机按定子数可分为单定子步进电机、双定子步进电机和多定子步进电机。步进电机按励磁相数可分为三相、四相、五相和六相步进电机,根据步进电机各相绕组的分布规律,将步进电机分为径向分相和轴相步进电机。
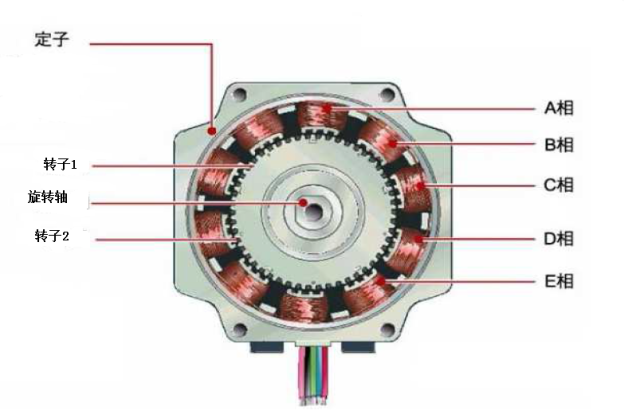
定子相数的分类、结构和原理 步进电机一次切换定子绕组的磁化电流时,转子会切换一个固定的角度,称为步距角。由于步距角通常是由开关相电流产生的旋转力矩来获得的,因此每相极数应该是偶数。步进电机通常有两个以上的相位,当然也有一些特殊的单相步进电机只有一个线圈。虽然它只有一个相位,但它实际上是一个由线圈驱动转子旋转而引起的磁通方向反转,步进电机的相数有单相、两相、三相、四相和五相。目前使用的步进电机大多采用永磁转子,永磁体广泛使用的原因是效率和高分辨率。
步进电机即使在停止工作时,也同样有供应电流通过步进电机。 因此步进电机具有自我保持力,并且自我保持力的最大值,被称为激励最大静止转矩。运行模式一般分为自起动和加减速模式,不需要设定加速和减速时间,即可瞬间达到启动和停止的自起动模式;设定加速和减速时间,逐渐将脉冲速度加快(减慢)的加减速运行模式。 决定相位角度的因素 步进电机分辨率越高,定位精度越高,为了获得高分辨率,我们应该设计更多的极点,永磁转子位于转子铁芯外表面的N极和S极之间。转子磁极数是N极和S极之和,这是一个简化的解释,假设磁极对数为1,转子永磁步进电机的步距角为θs,下式表示,其中Nr为转子磁极对数,P为定子相数: |