小型电动吊车(葫芦)控制电路原理与维修
|
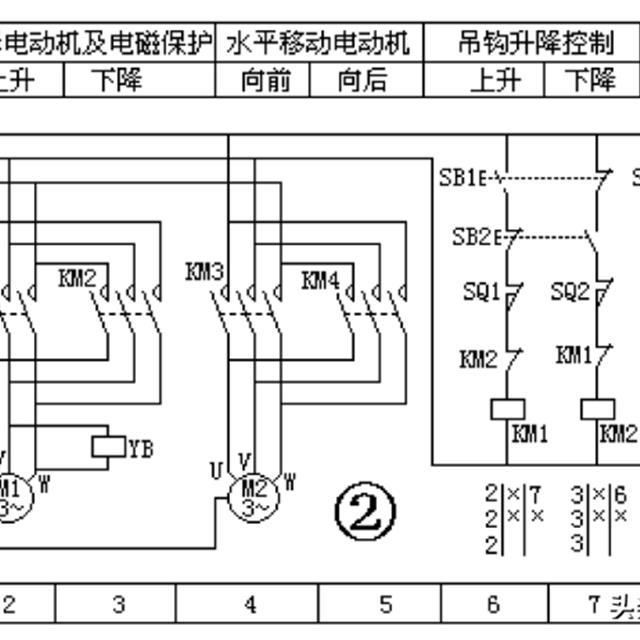
小型电动葫芦在工矿企业的修理与安装工作中发挥着重要作用,它是一种自身重量较小、结构较简单的起重机械,CD型钢丝绳电动葫芦的起重量有多种不同规格,分别可以起重0.5t、2t、3t、5t等不同重量。 电动葫芦的外形结构如图1所示。由提升部分和水平移动部分组成,并分别由电动机(以下简称电机)拖动。使用时由一台电机经过减速箱拖动钢丝绳卷筒,提升或降低重物。水平移动电机可在工字钢轨道上向前或向后移动。 为了保证操作安全,提升用的电机有电磁制动装置,电机提升或下降重物时,若遇停电或其他意外情况时,制动电磁铁失电,在制动装置弹簧力的作用下,对提升机构产生制动力,使吊钩停留在停电位置,以策安全。 一、电气控制电路及原理分析 电动葫芦的电气控制电路如图2所示。
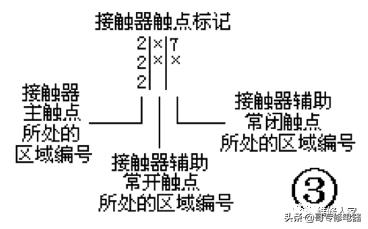
图2的中部是常规的电气原理图,包括电动葫芦的一次电路和二次控制电路。上部的矩形框是对电气原理图的标注及简要的文字说明。下部的矩形框内标记的是数字,它将电气原理图按基本功能单元划分成若干个区域,这些区域与图2上部的文字标注框成对应关系。在图2右下角交流接触器线圈图形符号下侧,标注的是接触器主触点与辅助触点所在的电路区号,图3对这些标注作了说明。
图3中有两条竖线将接触器的主触点和辅助触点分离开来,其中最左侧的数字是指接触器主触点所在的电路区号;两条竖线中间的数字是接触器辅助常开触点所在的电路区号,如果触点未被使用,则用符号“×”填充;最右侧一列数字是接触器辅助常闭触点所在的电路区号。 这些标记画在交流接触器线圈图形符号的下方,使得触点标记与接触器的图形符号呈上下对应关系。 电动葫芦使用2台锥形转子电机。图2中的KM1和KM2是吊钩升降电机M1的正、反转接触器,YB为吊钩电机的电磁制动器。当电机M1通电工作时,不管吊钩上升或者下降,电磁制动器YB均可通电,制动器放松,电机可以转动。当电机M1断电时,YB也断电,在制动器弹簧力作用下将电机刹车制动。 按钮SB1和SB2是吊钩电机M1的正反转点动启动复合按钮。所谓复合按钮,是说操作该按钮时,其常开触点、常闭触点均接入电路并产生相应的动作效果。行程开关SQ1和SQ2为限位保护,可使吊钩上升或下降至极限位置时及时断电停机。水平移动电机M2的电气控制电路与与升降电机M1的控制电路相似,只是没有制动装置。水平移动电机的控制电路中也设置有两只行程开关SQ3和SQ4进行限位保护,防止电动葫芦在移动时超出移动范围。 1.吊钩提升电机控制电路 合上电源开关QS(QS开关在图2中的1区),按下上升动作复合按钮SB1(在图2中的6区),接触器KM1线圈(在图2中的6区)通电吸合,其主触点(在图2中的2区)闭合,电磁制动器YB(在图2中的3区)通电释放,电机M1(在图2中的2区)定子线圈同时得电开始正转,吊钩上升,吊钩上升到需要位置时松开按钮SB1,接触器KM1线圈断电,主触点断开,电机M1断电,同时电磁制动器YB也断电,在制动器弹簧力作用下对电机进行制动,吊钩上升动作结束。 2.吊钩下降控制电路 需要吊钩下降时,按下下降动作复合按钮SB2(在图2中的7区),接触器KM2线圈(在图2中的7区)通电吸合,其主触点(在图2中的3区)闭合,电磁制动器YB(在图2中的3区)通电释放,电机M1(在图2中的2区)定子绕组获得反相序电源开始反转,吊钩开始下降,吊钩下降到需要位置时松开按钮SB2,接触器KM1线圈断电,主触点断开,电机M1断电,同时电磁制动器YB也断电,在制动器弹簧力作用下对电机进行制动,吊钩下降动作结束。 |