激光雷达不只测距离了:从位置、速度到材质识别,下一代机器视觉正在变聪明
|
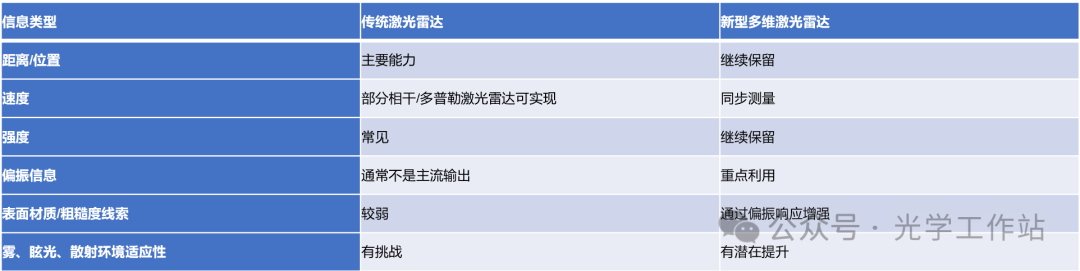
不用激光雷达,也能看出物体形状?偏振三维重建到底强在哪 激光雷达要被“芯片化”?MIT 新光子芯片让 LiDAR 不再靠机械转动 硅光相控阵,激光雷达正在走向更小、更稳、更适合集成的下一代形态 过去我们谈激光雷达,最常见的理解是: 它能告诉机器“物体在哪里”“距离有多远”“三维轮廓是什么”。 但下一代激光雷达,可能不再只是“测距仪”,而是会逐渐变成一种更聪明的机器视觉传感器。 它不仅要看见一个物体的位置,还要判断它是不是在运动、速度是多少,甚至还要进一步理解:这个表面更像金属、塑料、植物、粗糙材料,还是某种特殊反射表面。 也就是说,激光雷达正在从“看见形状”,走向“理解物体”。 这背后真正重要的变化是:机器视觉不再只依赖相机和AI算法去猜,而是开始从光本身携带的信息里,直接提取更多物理属性。 一、传统激光雷达主要解决什么问题? 传统激光雷达的核心任务很清楚:测距离,建点云,生成三维空间结构。 它通常通过发射激光,再接收反射回来的光信号,根据时间差、相位差或频率变化,计算目标距离。 所以在自动驾驶、机器人、无人机、测绘和工业检测中,激光雷达非常重要。它能提供相机难以稳定获得的三维几何信息。 但传统激光雷达也有一个明显短板: 它知道“那里有东西”, 也知道“那个东西离我多远”, 但它不一定知道“那个东西是什么”。 比如路边一个牌子、一辆车、一棵树、一块金属板、一片塑料膜,在点云里可能都是一堆空间坐标。真正要识别它们,还需要相机、毫米波雷达、AI模型、语义分割算法一起辅助。 这就是为什么未来机器视觉的发展方向,不只是提高点云密度,而是要提高“信息维度”。 二、这项新型激光雷达厉害在哪? 加拿大多伦多大学与Ciena合作的这类新型激光雷达,核心亮点是:在每一个扫描点上,通过单次测量,同时获得距离、速度和表面材料相关信息。 它不是只输出一个深度点,而是希望让每个点都带有更多“物理标签”:
研究团队称,该系统能在每个扫描点上用单次测量获得毫米级距离、速度和表面材料信息,并使用眼安全激光功率;相关成果发表于 Optica。 这句话背后有一个很关键的产业趋势: 激光雷达正在从“空间测量设备”,升级为“物理世界感知设备”。
三、它为什么能多看出这么多信息? 关键不只是“激光更强”,而是它开始利用光的更多属性。 一束光并不只有亮度和飞行时间,它还有: 振幅 相位 频率 偏振 多普勒频移 与表面相互作用后的变化 普通激光雷达更多利用“光什么时候回来”。 相干激光雷达还可以利用“光的相位和频率怎么变”。 而这类新系统进一步利用“光的偏振状态怎么变”。 这就像过去机器只听到一句话的音量,现在它还能听懂语调、节奏、口音和情绪。 研究中使用了一个非常有意思的思路:把通信领域里的相干光调制解调器,改造成激光雷达的发射和接收核心。 相干光调制解调器原本用于高速光通信,可以高速、精确地控制和测量光的频率、偏振、相位和振幅。研究团队将这种标准通信器件用于激光雷达,使系统能够从每次测量中提取比传统激光雷达更多的信息。 这点非常关键。 因为它说明下一代激光雷达的突破,不一定只来自传统车载激光雷达路线,也可能来自光通信、相干探测、偏振成像、计算成像和AI重建算法的融合。 四、位置、速度、材质分别怎么测? 可以拆成三个层次理解。 1. 距离:看光返回的时间或调制信号变化 激光打到目标表面后反射回来。系统通过分析返回信号与发射信号之间的时间关系,就可以计算距离。 这部分是激光雷达最基础的能力。 它回答的是: 这个点在哪里? 2. 速度:看多普勒频移 如果目标在运动,反射回来的光会产生频率变化,也就是光学多普勒效应。 通过分析这种频率变化,就可以判断目标是否在运动,以及它沿激光方向的速度。 它回答的是: 这个点是不是在动?动得多快? 在自动驾驶里,这一点特别重要。因为只知道前方有个物体还不够,系统还要判断它是静止障碍物、正在靠近的车辆,还是正在横穿道路的行人。 3. 材质:看偏振变化和表面散斑特征 这是最值得关注的部分。 不同材料、不同表面粗糙度、不同几何结构,对光的偏振状态影响并不一样。 比如金属、塑料、植物叶片、粗糙表面、光滑表面,对偏振光的反射和散射特征会有差异。 这类系统通过测量光与目标表面相互作用后的偏振变化,尝试恢复目标表面的偏振响应,从而获得材料和表面状态相关信息。研究团队还提到,偏振散斑中包含表面粗糙度信息,可用于更细尺度的材料表征。 它回答的是: 这个点可能是什么表面?材质特征是什么?粗糙还是光滑? 但这里一定要注意: 这并不等于激光雷达已经可以像光谱仪一样精确分析化学成分。 更准确的说法是: 它通过偏振响应、散斑统计和表面反射特征,获得材料相关线索。 这已经非常重要,但不能夸大成“看一眼就知道所有材料成分”。
五、为什么偏振信息这么重要? 普通相机看颜色。 热像仪看热辐射。 |