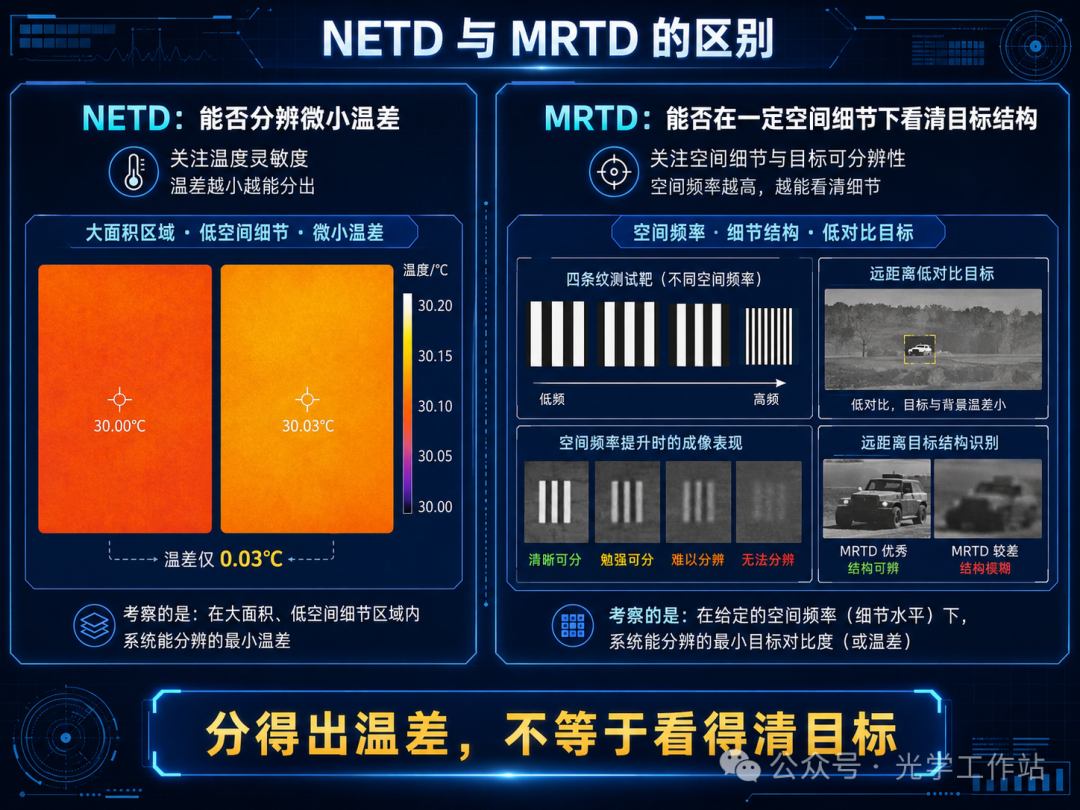
为什么高端红外系统要看MRTD? 从NETD、空间分辨率到真实目标识别能力一次讲清楚
|
红外热像仪到底选短焦、中焦还是长焦? 视场角、距离和空间分辨率一次讲清楚 红外镜头为什么这么贵? 锗、硫系玻璃、F数、镀膜和无热化设计一次讲清楚 很多人评价红外热像仪,喜欢看两个参数: 分辨率是多少?NETD是多少? 比如640×512、1280×1024,NETD≤50mK、≤30mK,听起来已经很专业。 但在高端红外系统里,尤其是防务、边海防、遥感、车载夜视、无人机载荷、远距离监控等场景中,只看这些还不够。 因为用户真正关心的不是实验室里一个参数有多漂亮,而是: 远处目标能不能发现? 目标轮廓能不能看清? 人、车、船、设备能不能区分? 低对比目标能不能从背景里分出来? 系统在真实环境下到底有没有识别能力? 这就引出了一个更系统级的指标: MRTD:Minimum Resolvable Temperature Difference 最小可分辨温差 它衡量的不是单个像素有多灵敏,而是整套红外系统在不同空间细节尺度下,能分辨多小的温差目标。 简单说: NETD更像是探测器和系统噪声能力; MRTD更接近真实目标能不能被看清。 所以,高端红外系统看MRTD,本质上是在问: 这套系统不是参数好不好看,而是真正在远距离、低对比、复杂背景下能不能识别目标。 一、先讲清楚:NETD解决的是“分不分得出温差” NETD全称是噪声等效温差。 它表示系统能够分辨多小的温度差。 例如: NETD≤80mK,说明系统大约能分辨0.08℃级别温差; NETD≤50mK,说明温差分辨能力更好; NETD≤30mK,说明弱温差细节表现更强; NETD≤20mK,通常属于较高灵敏度水平。 NETD越低,图像中细微温差越容易被看见。 它对以下场景非常重要: 建筑保温缺陷; 设备早期温升; 人体、动物、车辆弱温差目标; 远距离低对比目标; 夜间复杂背景观察; 科研热过程分析。 但NETD有一个明显局限: 它主要描述“温差灵敏度”,不直接描述“目标能不能被看清” 一台热像仪NETD很低,说明它对温差很敏感。 但如果镜头解析力不够、焦距不合适、目标像素覆盖不足、图像模糊、算法过度平滑,那么真实目标仍然可能看不清。 也就是说: NETD好,说明系统能感知微弱温差; 但不代表系统一定能分辨复杂目标细节。
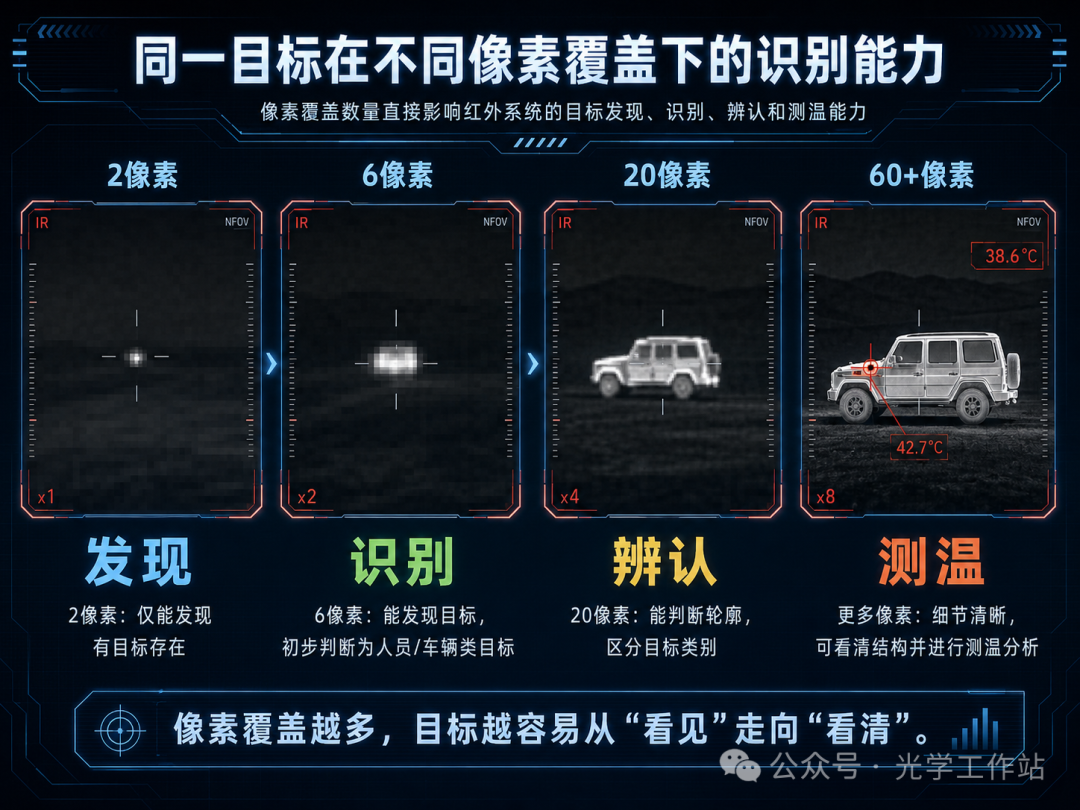
二、分辨率解决的是“有多少像素”,也不是全部 分辨率指红外探测器有多少像元。 比如: 384×288; 640×512; 1024×768; 1280×1024。 分辨率越高,理论上图像采样点越多,空间细节越丰富。 但同样有一个问题: 分辨率高,不等于目标一定清楚 因为真实系统中,目标能不能看清,还取决于: 镜头焦距; 视场角; 像元间距; 镜头MTF; 光学像差; 对焦状态; 大气扰动; 目标与背景温差; 图像算法; 显示系统; 观察者判断。 同样640×512: 配短焦镜头,适合大范围搜索,但远处小目标很小; 配长焦镜头,远处目标更大,但视场变窄; 配高质量镜头,边缘细节清晰; 配低质量镜头,像素再多也可能糊。 所以,分辨率只是“采样数量”,不是“实际识别能力”。 三、空间分辨率:目标到底占多少像素? 高端红外系统真正关心的是目标在图像中占多少像素,以及这些像素能不能形成可识别结构。 例如,一个远处人员目标: 只占2个像素:可能只是一个亮点; 占6个像素:可能知道那里有人形目标; 占20个像素:可能看出人体轮廓; 占更多像素:才可能判断姿态、动作和细节。 对于车辆、船只、无人机、火点、电力接头等目标也是一样。 所以,真实目标识别不是只看温差,也不是只看总像素数,而是看: 目标尺寸、目标距离、镜头焦距、探测器分辨率共同决定的目标像素覆盖。 这也是为什么红外系统会区分: 探测距离; 识别距离; 辨认距离; 测温距离。 这些距离不是一个概念。 能发现一个热斑,不代表能识别目标; 能识别目标轮廓,不代表能看清细节; 能看清目标,不代表能准确测温。
四、MRTD到底是什么? MRTD全称是: Minimum Resolvable Temperature Difference 最小可分辨温差 它通常用于评价红外成像系统在不同空间频率下的综合成像能力。 可以简单理解为: 给系统看一个冷热条纹目标,在条纹越来越细、温差越来越小时,观察者还能不能分辨出条纹。 如果某个系统在很小温差下,仍然能分辨较细的条纹,说明它的综合成像能力强。 如果条纹稍微变细或温差稍微降低,画面就糊成一片,说明系统实际分辨能力有限。 MRTD测试通常会用类似四杆靶、条纹靶等目标,让红外系统观察不同空间频率、不同温差的测试图案。 它关心的是: 目标温差; 条纹宽度; 空间频率; 光学成像质量; 探测器噪声; 图像处理; 显示效果; 人眼或算法识别能力。 所以MRTD不是单纯探测器指标,而是整机指标。
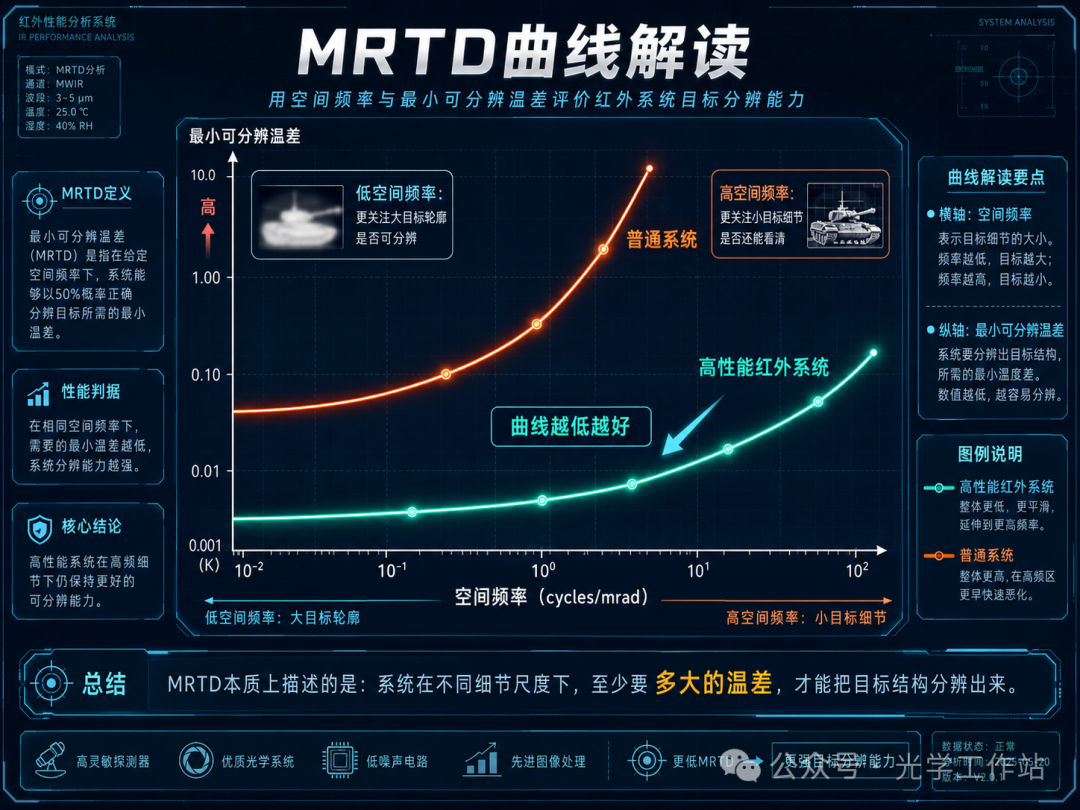
五、MRTD为什么比NETD更接近真实应用? NETD更像是回答: 系统能不能感受到微小温差? MRTD更像是回答: 系统能不能把有空间结构的低温差目标看清楚? 真实目标从来不是一个均匀大平面。 它有形状、边缘、纹理、尺寸和背景干扰。 比如远处一辆车,不只是一个温度块,而是: 车身轮廓; 车轮位置; 发动机热区; 车窗冷区; 背景地面; 天空或建筑背景。 如果系统只是在大面积均匀目标上NETD很好,但空间细节表现差,真实识别仍然会受限。 MRTD把温差能力和空间分辨能力放在一起考察,因此更接近高端应用中的真实问题。 这就是为什么防务、边海防、远距离监控、车载夜视等系统更重视MRTD。 因为这些应用关心的是: 在真实距离下,低对比目标能不能被看清,而不是实验室里一个单点噪声指标有多好。 六、MRTD曲线怎么看? MRTD通常不是一个单独数字,而是一条曲线。 横轴通常可以理解为空间频率,也就是目标细节有多密。 纵轴是最小可分辨温差,也就是需要多大的温差才能看清该空间频率下的目标。 可以这样理解: 低空间频率 代表目标结构比较粗,比如宽条纹、大目标、大轮廓。 这类目标比较容易分辨,所需温差较低。 高空间频率 代表目标结构比较细,比如窄条纹、小目标、细节边缘。 这类目标更难分辨,需要更大的温差,或者更好的光学和探测器性能。 一条优秀的MRTD曲线,通常意味着: 在较低空间频率下,所需温差很小; 在较高空间频率下,仍然保持较好的分辨能力; 曲线整体更低,说明系统能在更小温差下分辨目标; 曲线延伸更远,说明系统能处理更细空间细节。 简单说: MRTD曲线越低越好,越能延伸到高空间频率越好。
七、MRTD受到哪些因素影响? MRTD是系统级指标,所以它受到很多环节影响。 1. 探测器NETD NETD越低,系统噪声越小,弱温差目标越容易看见。 但NETD只是基础。 如果后面的光学和空间分辨能力跟不上,MRTD仍然可能不好。 2. 镜头MTF MTF表示光学系统传递空间细节的能力。 镜头MTF越好,目标边缘和细节保留越好。 如果镜头本身把细节糊掉,探测器再好也很难恢复真实目标结构。 3. 焦距和视场角 焦距决定目标在焦平面上成像多大。 同一个目标,在长焦镜头下覆盖更多像素,更容易分辨。 但长焦视场变窄,搜索效率降低。 4. 像元间距和采样 像元间距越小,在同样焦距下空间采样越细。 但像元变小后,单个像元收集能量减少,对探测器灵敏度、F数和算法提出更高要求。 5. F数和通光量 |