简述高速钻床的伺服控制与精度检测标准
|
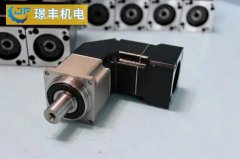
高速钻床步进伺服是一种用脉冲信号进行控制,并将脉冲信号转换成相应的角位移的控制系统。其角位移与脉冲数成正比,转速与脉冲频率成正比,通过改变脉冲频率可调节电动机的转速。如果停机后某些绕组仍保持通电状态,则系统还具有自锁能力。步进电动机每转一周都有固定的步数,如五百步、一千步、五万步等等,从理论上讲其步距误差不会累计。步进伺服结构简单,符合系统数字化发展需要,但精度差、能耗高、速度低,且其功率越大移动速度越低。特别是步进伺服易于失步,使其主要用于速度与精度要求不高的经济型高速钻床及旧设备改造。但近年发展起来的恒斩波驱动、PWM驱动、微步驱动、超微步驱动和混合伺服技术,使得步进电动机的高、低频特性得到了很大的提高,特别是随着智能超微步驱动技术的发展,将把步进伺服的性能提高到一个新的水平。 主轴伺服提供加工各类工件所需的切削功率,因此,只需完成主轴调速及正反转功能。但当要求高速钻床有螺纹加工、准停和恒线速加工等功能时,对主轴也提出了相应的位置控制要求,因此,要求其输出功率大,具有恒转矩段及恒功率段,有准停控制,主轴与进给联动。与进给伺服一样,主轴伺服经历了从普通三相异步电动机传动到直流主轴传动。随着微处理器技术和大功率晶体管技术的进展,现在又进入了交流主轴伺服系统的时代。
高速钻床运用伺服系统提高双轴高速钻床加工速率首先将工件通过夹具固定在位于高速钻床中心的工作台上。按下“运行”按钮后,舱门封闭,位于工作台两真个驱动电机通过滚珠丝杠将带有钻头的加工台高速推进至工件接近位,到达接近位后由控制器给出电气信号使钻头工作,然后按固有深孔加工循环进行加工。为防止相对的两钻头打刀,由控制器通过软件编程实现两驱动电机互锁功能。即先加工至接近中线某位置的驱动电机会发出信号锁住另外一边的驱动电机,使其进进“暂停”状态,待电机退回至稳定位置后解除原电气信号使另外一边的驱动电机继续完成其自身的加工动作。工件加工完成后,控制器给出相应电气信号打开舱门并且等待下次循环动作的“运行”开始。 |