反应式步进电机的结构及工作原理详解
|
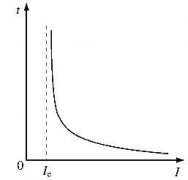
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 本文小编主要介绍的是反应式步进电机的结构及工作原理,以三相及四相反应式步进电机为例子详细解说其工作原理。 反应式步进电机,是一种传统的步进电机,由磁性转子铁芯通过与由定子产生的脉冲电磁场相互作用而产生转动。 反应式步进电机工作原理比较简单,转子上均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。市场上一般以二、三、四、五相的反应式步进机居多。 反应式步进电动机的结构形式很多,按定转子铁芯的段数分为单段式和多段式两种。 1、单段式步进电机 单段式步进电机是定转子为一段铁芯。由于各相绕组沿圆周方向均匀排列所以又称为径向分相式。它是步进电动机中使用最多的一种结构形式。如图4-4为相反应式步进电动机的径向截面图。定转子铁芯由硅钢片叠压而成,定子磁极为凸极式,磁极的极面上开有小齿。定子上有三套控制绕组,每一套有两个串联的集中控制绕组分别绕在径向相对的两个磁极上。每套绕组叫一相,三相绕组接成星形,所以定子磁极数通常为相数的两倍,即2p=2m(p为极对数m为相数)转子上没有绕组,沿圆周也有均匀的小齿,其齿距和定子磁极上小齿的齿距必须相等,而且转子的齿数有一定的限制。这种结构形式的优点是制造简便,精度易于保证,步距角可以做得较小。容易得到较高的启动和运行频率。其缺点是在电机的直径较小而相数又较多时,沿径向分相较为困难,消耗功率大,断电时无定位转矩。 2、多段式步进电机 多段式步进电机是定转子铁芯沿电机轴向按相数分成m段。由于各相绕组沿着轴向分布,所以又称为轴向分相式。按其磁路的结构特点有两种,一种是主磁路仍为径向,另一种是主磁路包含有轴向部分。 1、较高的力矩转动惯量比 2、步进频率较高,频率响应快 3、不通电时可以自由转动、结构简单、寿命长的特点。 |